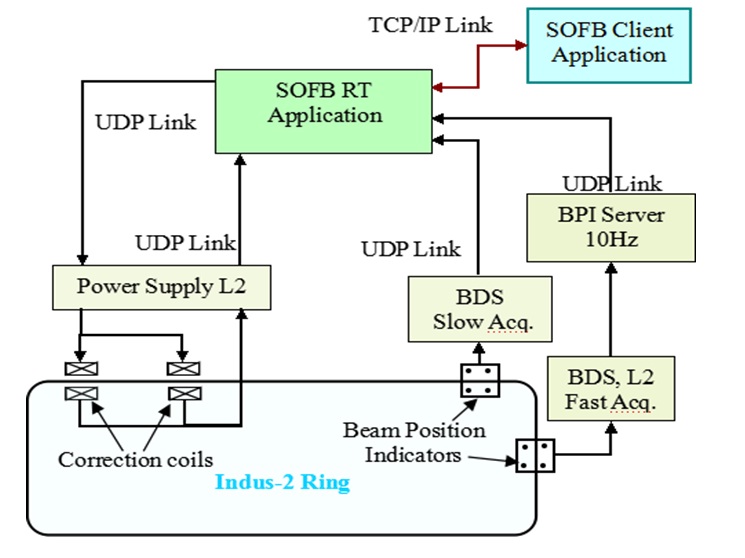
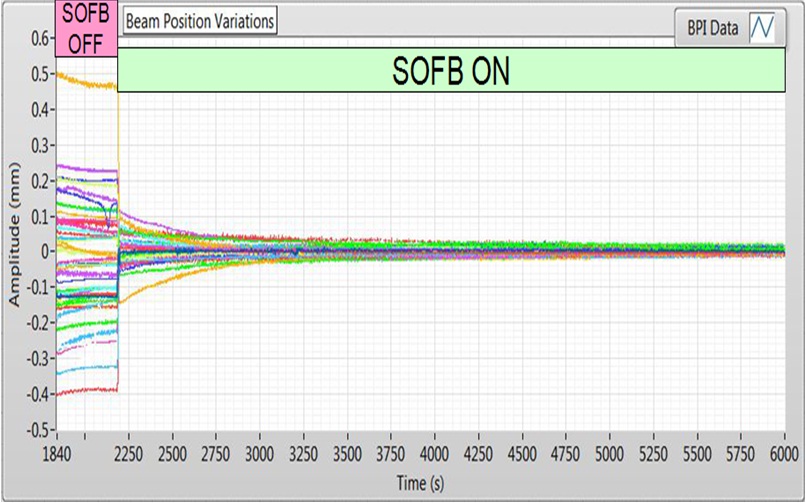
Model Predictive Control: A new, model based predictive control (MPC) has been implemented for the control of beam position around the ring at 56 BPI locations by using 40 vertical and 48 horizontal steering coils. The control is done through a Real Time (RT) controller PC put on Layer 2 which takes BPI data on per second basis from Beam Diagnostics System (BDS) at Layer 2 and updates the corrector PSs system at L2. So effectively a two layer control system is implemented which is an improvement from earlier version of SOFB where control was implemented on the L1 layer (User Interface Layer). The correction rate employed is once per 3 seconds (1/3 Hz). The correction range of SOFB is from few mm down to about 30 microns. MPC has the advantage of utilizing available correction strength of correctors effectively by optimizing the control sequence based on the present operating condition of the machine.