होम लेसर नियंत्रण एवं उपकरणीकरण प्रभाग
होम लेसर नियंत्रण एवं उपकरणीकरण प्रभाग
मशीन दृष्टि प्रणाली
ले नि एवं उ प्रभाग परमाणु ईंधन और परमाणु ईंधन की असेंबली में उपयोग किए जाने वाले विभिन्न पुर्जों के निरीक्षण हेतु मशीन दृष्टि आधारित निरीक्षण प्रणाली/उपकरण का विकास करता हैI ले नि एवं उ प्रभाग इन प्रणालियों को प ऊ वि की विभिन्न अन्य इकाइयों के सहयोग से विकसित कर रहा है
अन्य इकाइयां जिनका सहयोग ले नि एवं उ प्रभाग को प्राप्त है :
- परमाणु ईंधन सम्मिश्र (एनएफसी), हैदराबाद,
- रेडियो धातुकर्म (मेटलर्जी) प्रभाग (आरएमडी), बीएआरसी, मुंबई
- परमाणु ईंधन निर्माण सुविधा (एएफएफएफ), बीएआरसी, तारापुर
यह निरीक्षण प्रणालियाँ/उपकरण मोटे तौर पर निम्नलिखित तीन मुख्य श्रेणियों में आते है :
- मशीन विजन आधारित मेट्रोलॉजी सिस्टम
- मशीन विजन आधारित ओसीआर/ओसीवी सिस्टम
- मशीन विजन आधारित निरीक्षण सिस्टम
मशीन विजन आधारित मेट्रोलॉजी प्रणालियाँ
- FBTR फ्यूल पिन के टॉप प्लग पर मौजूद खांचे (स्लॉट) के आयामों को मापने के लिए उपकरण
- पीएचडब्ल्यूआर ईंधन पंचों के लिए विमीय निरीक्षण प्रणाली
- बियरिंग पैड आयामी निरीक्षण प्रणाली
- बीडब्ल्यूआर प्लग के लिए मैट्रोलोजी सिस्टम
- क्लैड ट्यूब पर चम्फर के निरीक्षण के लिए निरीक्षण प्रणाली
- PHWR ईंधन तत्व (37e) छोर प्रोफाइल निरीक्षण प्रणाली
- अंत-प्लेट आयाम माप प्रणाली
- अंत-प्लग आयामी निरीक्षण प्रणाली
- औद्योगिक घटकों के लिए मेट्रोलॉजी प्रणाली
मशीन विजन आधारित ओसीआर/ओसीवी प्रणालियाँ
- PHWR ईंधन बंडल संख्या पहचान प्रणाली
मशीन विजन आधारित निरीक्षण सिस्टम
- गुटिका निरीक्षण प्रणाली
- FBTR वेल्ड मेटलोग्राफ निरीक्षण प्रणालियाँ
- PHWR ईंधन ट्यूब निरीक्षण प्रणाली
मशीन विजन आधारित मेट्रोलॉजी प्रणालियाँ
परमाणु ऊर्जा संयंत्र, मोटर वाहन, एयरोस्पेस, रक्षा उपकरण आदि के महत्वपूर्ण घटकों और प्रणालियों के लिए निर्मित पुर्जों के लिए अत्यंत कठोर आयामी मापदंड निर्धरित होते हैं। इस कारण इन पुर्जोंके निर्माण में कई चुनौतियां का सामना करना पड़ता है। ये पुर्जे भिन्न आकारों और जटिल ज्यामिति के होते हैं, जिनके विभिन्न आयाम के सटीक निर्धारण की आवश्यकता होती है। उच्च माप विभेदन (रिज़ॉल्यूशन) (कुछ माइक्रोन तक) प्रदान कर सकने के कारण मशीन दृष्टि (विजन) प्रणाली पुर्जों और उनकी असेंबली के निरीक्षण में महत्वपूर्ण भूमिका निभाती है। मशीन दृष्टि आधारित माप प्रणाली में पुर्जों कों छूए बिना पुर्जों के विभन्न आयाम माप सकते है, इस वजह से इस प्रणाली में पुर्जों का दूरस्थ निरीक्षण संभव है। अत: इस विधि से आसानी से कम समय में ज्यादा पुर्जों का स्वचालित निरीक्षण किया जा सकता है।
ले नि एवं उ प्र (एलसीआईडी), राराप्रप्रौकें ने आयामी निरीक्षण के लिए मशीन विजन आधारित मेट्रोलॉजी प्रणाली में विशेषज्ञता विकसित की है। विशेष रूप से डिजाइन एवं निर्मित यह मेट्रोलोजी प्रणालियां प्रयोक्ता की आवश्यकतानुसार मापन में सटीकता और पुनरावृत्ति प्रदान करती है। यह प्रणालियाँ छाया-ग्राफ तकनीक पर आधारित हैं। इन प्रणालियों में पुर्जों कों विशेष रूप से निर्मित पुर्जा पकड़ने वाले जिग की सहायता से लगाया जाता है। विकसित सॉफ्टवेयर, पुर्जो के सभी मापों की पूरी रिपोर्ट तैयार करता है एवं यह भी बताता है की पुर्जा स्वीकार्य है या अस्वीकार्य है।
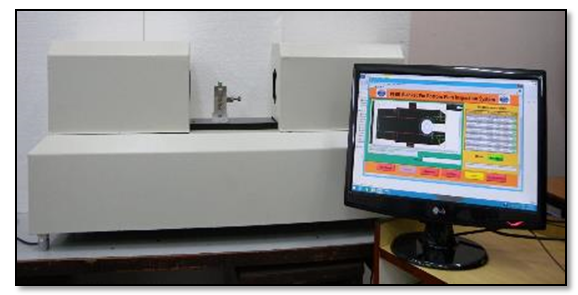
मशीन विजन मेट्रोलॉजी प्रणाली को चार भागों मे बाटा जा सकता है। पहला भाग रोशनी व्यवस्था (पुर्जों के एक तरफ), दूसरा भाग इमेजिंग ऑप्टिक्स (पुर्जे के दूसरी तरफ)। इन दोनों भागों के बीच मे पुर्जा रखने की जगह। चौथा भाग होता है एम्बेडेड कम्प्युटर जो पुर्जे की छाया का उपयोग कर पुर्जे के आयामों को मापता है।
जिस घटक के आयामों को मापा जाना है, उसे पुर्जा रखने की जगह पर रखा जाता है। रोशनी द्वारा घटक की छाया उत्पन्न होती हैं, जो इमेजिंग ऑप्टिक द्वारा अर्जित (एक्वायर) की जाती है। प्रणाली में एक एम्बेडेड प्रोसेसर अंतर्निहित है। इस प्रोसेसर पर चलने वाला छवि (इमेज) प्रोसेसिंग और माप सॉफ्टवेयर, उपयोगकर्ता के लिए पुर्जे के विभिन्न आयामों को मापता है और प्रयोक्ता के आवश्यकतानुसार रिपोर्ट तैयार करता है। इस मेट्रोलोजी प्रणाली में पुर्जे के कई स्थानों पर आयामों मापा जाता है और आयाम के न्यूनतम, अधिकतम और औसत मूल्यों की सूचना दी जाती है।
औद्योगिक घटकों के विभिन्न आकार होते हैं। घटक माप आवश्यकता और सटीकता के आधार पर प्रणाली में भिन्नता होती है। ले नि एवं उ प्र (एलसीआईडी) ने पुर्जे के आकार, माप सटीकता और पुनरावृत्ति आवश्यकताओं को ध्यान में रखते हुए अलग अलग मॉडल विकसित किए हैं।
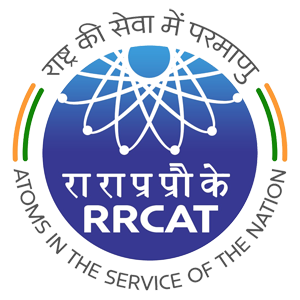
FBTR फ्यूल पिन के टॉप प्लग पर मौजूद खांचे (स्लॉट) के आयामों को मापने के लिए प्रणाली/उपकरण
चित्र b FBTR ईंधन पिन के शीर्ष प्लग का फोटो हैI इस शीर्ष प्लग पर जो खांचा है (स्लॉट) उसका आयाम बहुत महत्वपूर्ण हैI ले नि एवं उ प्रभाग ने शीर्ष प्लग पर मौजूद खांचे (स्लॉट) की चौड़ाई, खांचे (स्लॉट) की गहराई और खांचे (स्लॉट) के कोण को मापने के लिए एलईडी पैटर्न प्रोजेक्टर आधारित मेट्रोलॉजी उपकरण का विकस किया हैI यह एक स्टैंडअलोन सिस्टम है जिसमे एम्बेडेड नियंत्रक (कम्प्युटर) का उपयोग किया है। इस उपकरण को चलाने के लिए LCD स्पर्श पटल (टच स्क्रीन डिस्प्ले)का उपयोग किया है।
जैसा कि चित्र c में दिखाया गया है, पट्टी पैटर्न (वैकल्पिक काली और सफेद धारियाँ) शीर्ष प्लग पर प्रक्षेपित की जाती हैI शीर्ष प्लग पर मौजूद खांचा (स्लॉट) पट्टी प्रकाश (स्ट्राइप) पैटर्न को बदलता हैI स्ट्राइप पैटर्न में हुए बदलाव को कैमरे द्वारा अधिग्रहित किया जाता है और स्लॉट की चौड़ाई, स्लॉट की गहराई और स्लॉट कोण को मापने के लिए इस छवि (संशोधित स्ट्राइप पैटर्न की) को एम्बेडेड नियंत्रकों द्वारा संसाधित किया जाता है। सॉफ़्टवेयर तब उपयोगकर्ता द्वारा प्रदान किए गए स्वीकृति मानदंड के आधार पर प्लग को स्वीकार (एक्सैप्ट) या अस्वीकार (रिजैक्ट) करता है। मैनुअल निरीक्षण की तुलना में, यह प्रणाली तेज, सटीक है। यह कार्य अगर मानव प्रचालक करता है, तो पुनरावर्ती कार्य के कारण होनेवाली मानव थकान को टालता हैI विकसित प्रणाली की विशिष्टता इस प्रकार है:
| 1. | गहराई नापने की क्षमता | 8 µm |
| 2. | पुनरावर्तनीयता (Repeatability) | 10 µm (approx) स्लॉट की गहराई और चौड़ाई के लिए, 0.2 ° स्लॉट कोण के लिए |
| 3. | निर्धारित अवधि मे किया गणन कार्य | 2 सेकंड/प्लग |
| 4. | निरीक्षण रिपोर्ट | स्वचालित रूप से सहेजा गया |
यह प्रणाली रेडियो धातुकर्म प्रभाग (RMD), भा॰ प॰ अ॰ केंद्र (BARC) में कार्यान्वित हैI
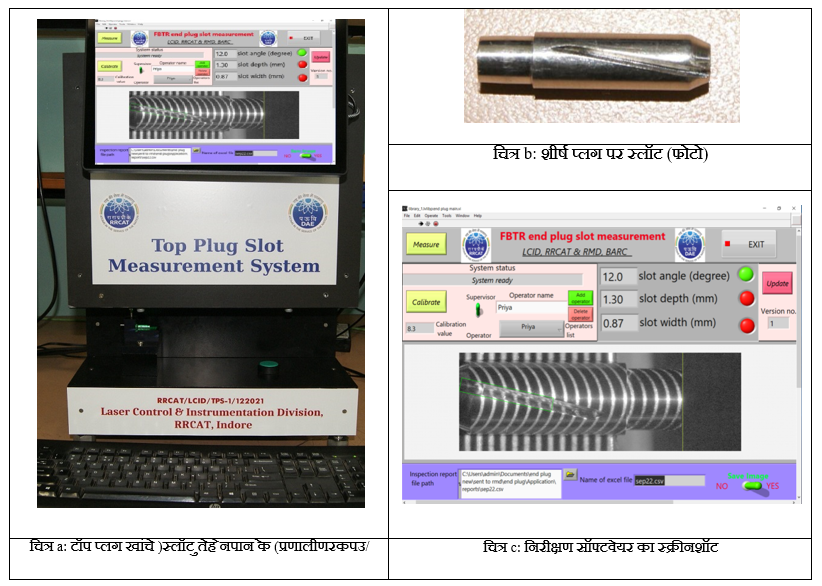
पीएचडब्ल्यूआर ईंधन पंचों के लिए विमीय निरीक्षण प्रणाली
| दृश्य क्षेत्र | : | 31 मिमी x 31 मिमी |
| माप विभेदन (रिज़ॉल्यूशन) | : | 6 µm (बैक लाइट) , 7 माइक्रोन (सामने रोशनी) |
| माप पुनरावृत्ति | : | <5 माइक्रोन |
| शुद्धता | : | ± 5 माइक्रोन |
| प्रवाह: | : | 20 पंच / घंटा |
इस मशीन विजन सिस्टम में दो इमेजिंग सिस्टम होते है:
i) स्ट्रक्चर्ड फ्रंट इल्युमिनेशन पर आधारित: पंच की नोक के प्रोफाइल के लिए
ii) बैक इल्युमिनेशन पर आधारित: पंच के बाहरी आयामों के लिए
एक मैग्नेटिक होल्डिंग ज़िग को पंचों के सभी 6 प्रकारों (लंबाई 30 मिमी से 110 मिमी तक भिन्न होती है और अलग-अलग व्यास होते हैं) के लिए डिज़ाइन और विकसित किया गया है जो दोहराने योग्य और आसान प्लेसमेंट सुनिश्चित करते हैं। पंच की पूरी लंबाई को कवर करने के लिए, उच्च परिशुद्धता रैखिक अनुवाद चरण का उपयोग करके पंचों को स्कैन किया जाता है।सिस्टम एक क्लिक पर पंचों के सभी आयामों को मापता है।मैनुअल निरीक्षण की तुलना में सिस्टम में तीन गुना अधिक प्रवाह है।
PHWR ईंधन पंचों के लिए आयामी निरीक्षण प्रणाली की तस्वीर
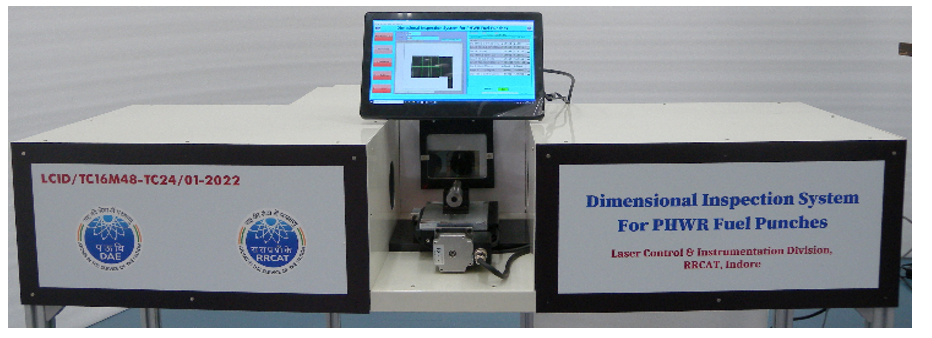
बियरिंग पैड आयामी निरीक्षण प्रणाली
पीएचडब्ल्यूआर ईंधन तत्वों के 8 प्रकारों के बियरिंग पैड के लिए मशीन दृष्टिआधारित स्वचालित आयामी निरीक्षण प्रणाली विकसित की गई है। प्रणाली में दो इमेजिंग सेट अप हैं जो एक साथ साइड व्यू और बियरिंग पैड के टॉप व्यू इमेज को कैप्चर करते हैं। सिस्टम आमतौर पर विभिन्न असर वाले पैड के 11 आयामों (ड्राइंग के अनुसार) को मापता है।
विवरण:
| दृश्य क्षेत्र | : | 35 मिमी X 29 मिमी |
| माप विभेदन (रिज़ॉल्यूशन) | : | ~ 15 माइक्रोन |
| माप पुनरावृत्ति | : | 10 माइक्रोन |
| शुद्धता | : | ± 10 माइक्रोन |
| प्रवाह | : | 3 नमूने / मिनट |
बीडब्ल्यूआर प्लग के लिए मैट्रोलोजी सिस्टम
विवरण:
| दृश्य क्षेत्र | : | 70 मिमी x 55 मिमी |
| माप विभेदन (रिज़ॉल्यूशन) | : | ~ 15 माइक्रोन |
| माप पुनरावृत्ति | : | <10 माइक्रोन |
| शुद्धता | : | ± 15 माइक्रोन |
| प्रवाह | : | 3 प्लग / मिनट |
गैर-संपर्क छाया ग्राफ तकनीक पर आधारित मशीन विजन आधारित स्वचालित मेट्रोलॉजी प्रणाली को जटिल आकार और ज्यामिति वाले बीडब्ल्यूआर प्लग के 10 प्रकारों के आयामी माप के लिए विकसित किया गया है। उपयोगकर्ता के अनुकूल माप सॉफ्टवेयर का उपयोग करके सिस्टम एक क्लिक पर विभिन्न प्लग के आमतौर पर 10-15 आयामों (ड्राइंग के अनुसार) को मापता है। इस प्रणाली से शत प्रतिशत जांच संभव है।
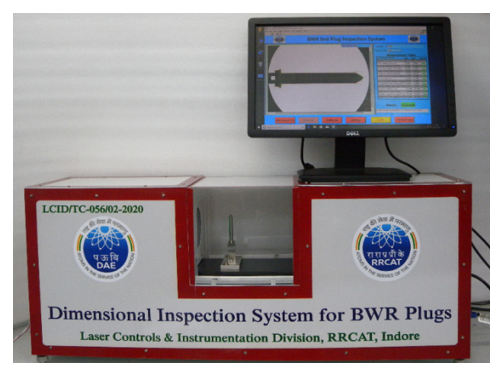
बीडब्ल्यूआर प्लग के लिए मैट्रोलोजी सिस्टम की तस्वीर
क्लैड ट्यूब पर चम्फर के निरीक्षण के लिए निरीक्षण प्रणाली
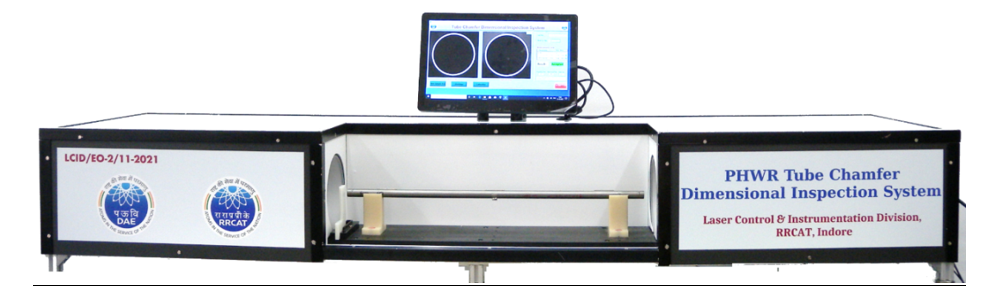
ट्यूब चम्फर डायमेंशनल इंस्पेक्शन सिस्टम की तस्वीर
विवरण:
| दृश्य क्षेत्र | : | 25.6 मिमी x 19.2 मिमी |
| माप विभेदन (रिज़ॉल्यूशन) | : | 6.27 µm |
| माप पुनरावृत्ति | : | <± 7 माइक्रोन |
| शुद्धता | : | <7 माइक्रोन |
| प्रवाह | : | 240 ट्यूब / घंटा |
| मापन ऑपरेशन | : | फुट स्विच, टच पैनल, कीबोर्ड, माउस का उपयोग करना |
डार्क फील्ड, फ्रंट लाइट इल्युमिनेशन तकनीक पर आधारित एक मशीन विजन आधारित स्वचालित डायमेंशनल इंस्पेक्शन सिस्टम डिजाइन और विकसित किया गया है। सिस्टम एक साथ एक शॉट में PHWR रिएक्टरों के 19-e और 37-e फ्यूल असेंबली के क्लैड ट्यूब के दोनों सिरों के V- आकार के एंड चेम्फर का माप करता है। निरीक्षण प्रणाली में 240 ट्यूब / घंटा का थ्रूपुट है जो मैन्युअल निरीक्षण की तुलना में 4 से 5 गुना अधिक है और 100% निरीक्षण के लिए रास्ता खोलता है। यह भी देखा गया है कि छवियों से चम्फर क्षति स्पष्ट रूप से दिखाई दे सकती है। स्वचालित चम्फर क्षति का पता लगाना संभव है।
PHWR ईंधन तत्व (37e) छोर प्रोफाइल निरीक्षण प्रणाली
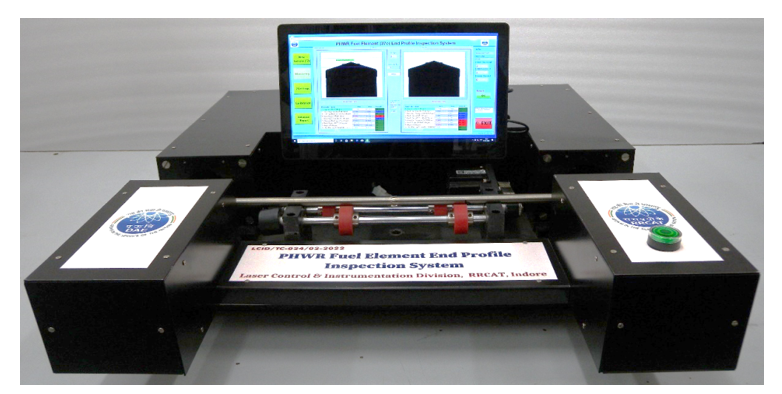
तत्व छोर प्रोफाइल इंस्पेक्शन सिस्टम की तस्वीर
स्वचालित मशीन दृष्टिप्रणाली में छायाग्राफ के आधार पर दो इमेजिंग सेटअप होते हैं जो दोनों सिरों का एक साथ निरीक्षण करते हैं। अंत की पूरी परिधि को कवर करने के लिए, तत्वको 180 डिग्री घुमाया जाता है और प्रत्येक छोर की 180 छवियां प्राप्त की जाती हैं और प्रत्येक 1 डिग्री पर संसाधित की जाती हैं। सिस्टम 10 माइक्रोन के रेजोल्यूशन के साथ एंड प्रोफाइल के 9 पैरामीटर मापता है। सिस्टम में 200 तत्व/घंटे का प्रवाह है जो 100% निरीक्षण को संभव बनाता है।
अंत-प्लेट आयाम माप प्रणाली
विवरण:
- दृश्य क्षेत्र: 100 मिमी x 94 मिमी
- माप विभेदन (रिज़ॉल्यूशन): 30 माइक्रोन
- माप पुनरावृत्ति: ±15 माइक्रोन
- मापने की समय अवधि: 3 प्लेट / मिनट
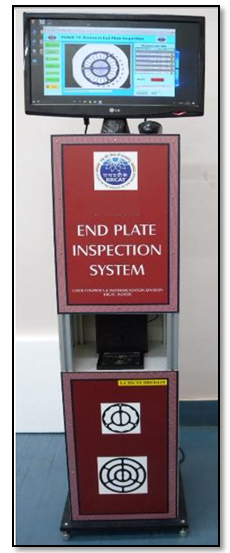
अंत-प्लेट निरीक्षण प्रणाली
अंत-प्लेट का बाहरी व्यास एक महत्वपूर्ण पैरामीटर है। इसलिए इसे 100 विभिन्न स्थानों पर मापा जाता है। इन 100 रीडिंग का उपयोग करके अंत-प्लेट के औसत व्यास की गणना की जाती है और प्रदर्शित किया जाता है। इसके अलावा, सॉफ्टवेयर अधिकतम और न्यूनतम व्यास भी बताता है। इन मापों के आधार पर उपयोगकर्ता द्वारा स्वीकार/अस्वीकार मानदंड निर्धारित किए जा सकते हैं। सॉफ्टवेयर में उपकरण का अंशांकन (कैलीब्रेशन) करने हेतु एक अंशांकन कार्यपद्धती प्रदान की गई है।
अंत-प्लग आयामी निरीक्षण प्रणाली
विवरण:
- दृश्य क्षेत्र: 46 मिमी x 38 मिमी
- माप विभेदन (रिज़ॉल्यूशन): 20 माइक्रोन
- माप पुनरावृत्ति: 20 माइक्रोन
- माप सटीकता: ±20 माइक्रोन
- मापने की समय अवधि: 4 प्लग / मिनट
अंत-प्लग निरीक्षण प्रणाली
औद्योगिक घटकों के लिए मेट्रोलॉजी प्रणाली
यह प्रणाली अलग अलग ज्यामिति और आकार के विभिन्न औद्योगिक परीक्षण नमूनों के आयामों को मापती है। प्रणाली में इमेज प्रोसेसिंग और माप सॉफ्टवेयर चलाने के लिये एम्बेडेड प्रोसेसर है, जो नमूनों के विभिन्न आयामों को मापता है। सॉफ्टवेयर उपयोगकर्ता के लिए अनुकूलित रिपोर्ट भी बनाता है।
विवरण:
- दृश्य क्षेत्र: 60 मिमी x 45 मिमी
- माप विभेदन (रिज़ॉल्यूशन): 13 माइक्रोन
- माप पुनरावृत्ति: 10 माइक्रोन
- माप सटीकता: ±13 माइक्रोन
- मापने की समय अवधि: 3 नमूने / मिनट

विभिन्न नमूनों के छाया-ग्राफ

औद्योगिक घटकों के लिए मेट्रोलॉजी प्रणाली
ये मेट्रोलोजी प्रणालियाँ अर्ध-स्वचालित मोड में भी काम कर सकती हैं या निरीक्षण कार्य को पूर्णतया स्वचालित किया जा सकता है। निरक्षण कार्य को स्वचालित करने हेतु इन मेट्रोलोजी प्रणालियों कों पिक एंड प्लेस, SCARA रोबोट या किसी अन्य उपयुक्त मल्टी अक्ष रोबोटिक मैनिपुलेटर के साथ एकीकृत किया जा सकता हैं।
मशीन दृष्टि आधारित इन प्रणालियाँ में बाजार में उपलब्ध सामाग्री का उपयोग किया गया है। ले नि एवं उ प्र (एलसीआईडी) को विश्वास है की वर्षों से विकसित जानकारी और विशेषज्ञता के बल हम किसी भी तरह के पुर्जों के आयाम मापन हेतु मेट्रोलोजी प्रणाली विकसित कर सकते है।
मशीन विजन आधारित ओसीआर/ओसीवी सिस्टम
PHWR ईंधन बंडल संख्या पहचान प्रणाली
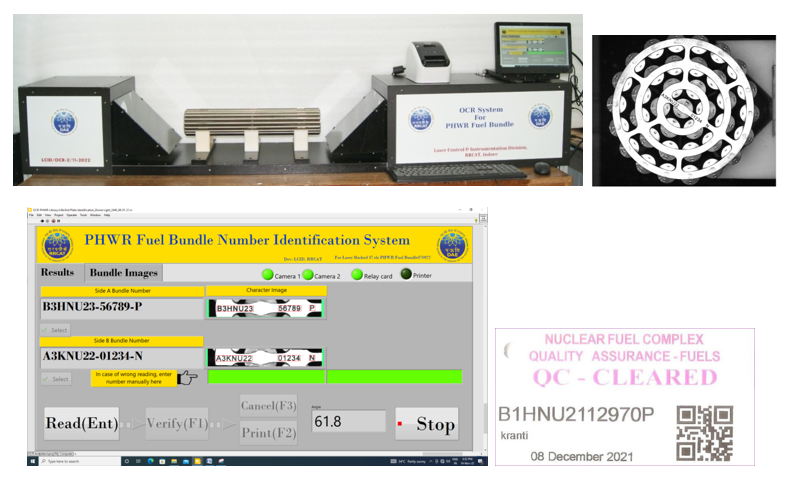
37 एलेमेंट PHWR ईंधन बंडल की बंडल संख्या को पढ़ने के लिए एक मशीन विजन आधारित OCR सिसट्म को विकसित किया गया है। यह एक आत्म-निर्भर सिस्टम है जिसमें 2 इमेजिंग सेटअप के साथ एक एम्बेडेड कंट्रोलर और प्रिंटर, टच स्क्रीन मॉनिटर के रूप में सभी I/O शामिल हैं। प्रत्येक ईंधन बंडल को एक अद्वितीय संख्या दी जाती है, जो विभिन्न मापदंडों पर आधारित होती है और बंडल के पूरे जीवन चक्र में उपयोग की जाती है। यह प्रणाली बंडल के दोनों सिरों से ईंधन बंडल संख्या पढ़ती है। इसमें 5 मेगा पिक्सेल का कैमरा-लेंस सिस्टम 100 मिमी X 100 की छवियों को कैप्चर करता है और डोम प्रकाश बन्डल को प्रकाशित करता है । सॉफ्टवेयर एल्गोरिथ्म बन्ड्ल पर अंकित बंडल संख्या को पहचानता है । यह सिस्ट्म छवियों से बंडल संख्या की पहचान बंडल नम्बर के किसी भी अभिविन्यास (0 से 360 डिग्री) और बंडल की किसी भी स्थिति पर कर सकता है। बंडल नम्बर की सत्यता की जाँच के पश्चात समतुल्य QR कोड प्रिंट किया जाता है जिसका प्रयोग बंडल को टैग करने के लिए किया जाता है।
मशीन विजन आधारित निरीक्षण सिस्टम
गुटिका निरीक्षण प्रणाली
बेलनाकार ईंधन गुटिका के दृश्य सतह निरीक्षण करने के लिए एक कम्प्यूटरीकृत मशीन विजन आधारित निरीक्षण प्रणाली विकसित की गई है। इस निरीक्षण प्रणाली में एक इमेजिंग प्रणाली शामिल है जो गुटिका सतह की एक उच्च गुणवत्तावाली छवि देती है। इमेजिंग प्रणाली में एक उच्च रिज़ॉल्यूशन कैमरा, मशीन विज़न लेंस और डिज़ाइन की गई रोशनी व्यवस्था शामिल हैं। प्राप्त छवि को संसाधित करने के लिए, गुटिका की सतह पर दोषों का स्वत: पता लगाने और विश्लेषण के लिए एक इमेज प्रोसेसिंग सॉफ्टवेयर विकसित किया गया है।

प्रणाली 2.5 सेकंड/ गुटिका का थ्रूपुट देती है। सिस्टम द्वारा स्वीकार किए गए गुटिका के बीच, 98.3% गुटिका में सही निर्णय लिया गया। प्रणाली अपनी निष्पक्षता, बेहतर विश्वसनीयता, उच्च गति, सटीकता और गुणात्मक मूल्यांकन करने की क्षमता के कारण मानव निरीक्षण के अपेक्षा श्रेष्ठ है।
FBTR वेल्ड मेटलोग्राफ निरीक्षण प्रणालीb
मेटलोग्राफी माइक्रोस्कोपी का उपयोग करके धातुओं की भौतिक संरचना और घटकों का अध्ययन किया जाता है। रेडियो धातुकर्म प्रभाग (RMD) द्वारा टॉप प्लग और फ्यूल पिन के बीच वेल्ड की गुणवत्ता का अध्ययन करने हेतु मेटलोग्राफी तकनीक का उपयोग किया जाता हैI इस कार्य के लिए ले नि एवं उ प्रभाग ने वेल्ड मेटलोग्राफ निरीक्षण प्रणाली विकसित की है। इस प्रणाली में दो अलग-अलग इमेजिंग प्रणालियाँ (सिस्टम) शामिल हैं। पहली इमेजिंग प्रणाली रिंग लाइट रोशनी का उपयोग कर 0.35x का आवर्धन के साथ इमेज अधिग्रहित की जाती है, जबकि अन्य इमेजिंग प्रणाली में समाक्षीय रोशनी का उपयोग कर 6X आवर्धन के साथ इमेज अधिग्रहित की जाती है। मेटलोग्राफ की छवि गुणवत्ता बढ़ाने के लिए दो अलग-अलग रोशनी का चयन किया है।
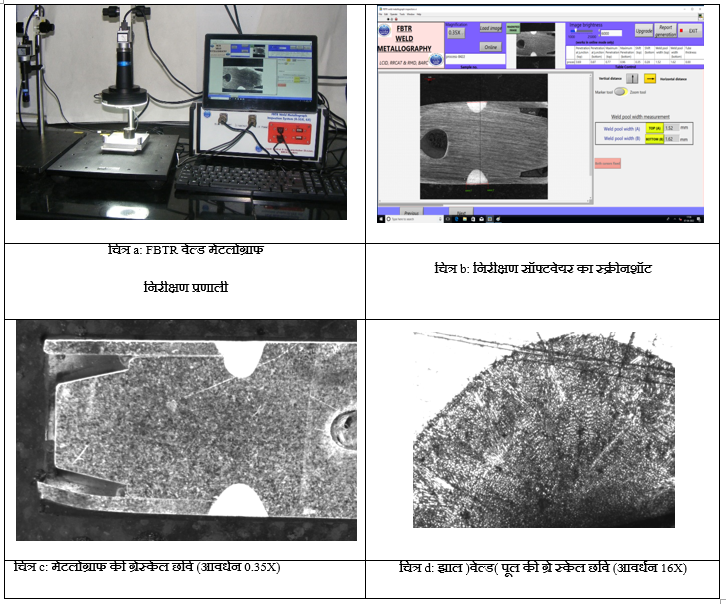
कम आवर्धन छवि का उपयोग वेल्ड पूल की गहराई, वेल्ड पूल की लंबाई, वेल्ड के पास ट्यूब की दीवार की मोटाई और प्लग के अंत से वेल्ड पूल की दूरी को मापने के लिए किया जाता है। जबकि वेल्ड पूल की उच्च आवर्धन छवि का उपयोग, वेल्ड क्षेत्र में वेल्ड की गुणवत्ता और कण संरचना (ग्रैन स्ट्रक्चर) का निरीक्षण करने हेतु किया जाता है। चित्रा c में दिखाई दे रहा सफेद अर्धवृत्त वेल्ड पूल को दर्शाता है, जहां चित्र d झाल (वेल्ड) पूल में कण की संरचना को दर्शाता है। इन दोनों इमेजिंग सिस्टम में एम्बेडेड प्रोसेसर के साथ एक कॉमन कंट्रोलर है। एम्बेडेड कंट्रोलर पर चलने वाले सॉफ्टवेयर में इमेजिंग सिस्टम को चुनने की सुविधा है। निरीक्षण सॉफ्टवेयर इन दो इमेजिंग सिस्टम से प्राप्त छवियों को प्रोसेस करता है। 0.35X आवर्धन के साथ इमेजिंग सिस्टम से प्राप्त छवि के मामले में, सॉफ्टवेयर, जोड़ पर वेल्ड पूल की गहराई, वेल्ड पूल की अधिकतम गहराई, वेल्ड पूल के अधिकतम गहराई का वेल्ड पूल जोड़ से खिसकाना, वेल्ड पूल की चौड़ाई और ट्यूब मोटाई इत्यादि नापता है।
6x प्रणाली के साथ, सॉफ्टवेयर संभावित क्षेत्र / क्षेत्र को इंगित करता है जहां सरंध्रता, समावेशन, दरारें, जोड़ गहराई की कमी, अंडरकट जैसे सूक्ष्म संरचना दोष पाये जाने की संभावना है। इन दोषों की उपस्थिति की पुष्टि करना निरीक्षणकर्ता की जिम्मेवारी है। दोषों की पहचान की प्रक्रिया को स्वचालित करने के लिए आर्टिफ़िश्यल इंटेलिजेंस (एआई) की आवश्यकता होती है और LCID उन्हें RMD की मदद से विकसित करने की योजना बना रहा है।
इमेजिंग सिस्टम के निर्दिष्टीकरण :
1. 0.35x आवर्धन के साथ सिस्टम का ऑप्टिकल रिज़ॉल्यूशन = 2.2 µm/0.35 ≈ 7 µm
2. 6x आवर्धन के साथ सिस्टम का ऑप्टिकल रिज़ॉल्यूशन = 2.2 µm/6 ≈ 0.4 µm.
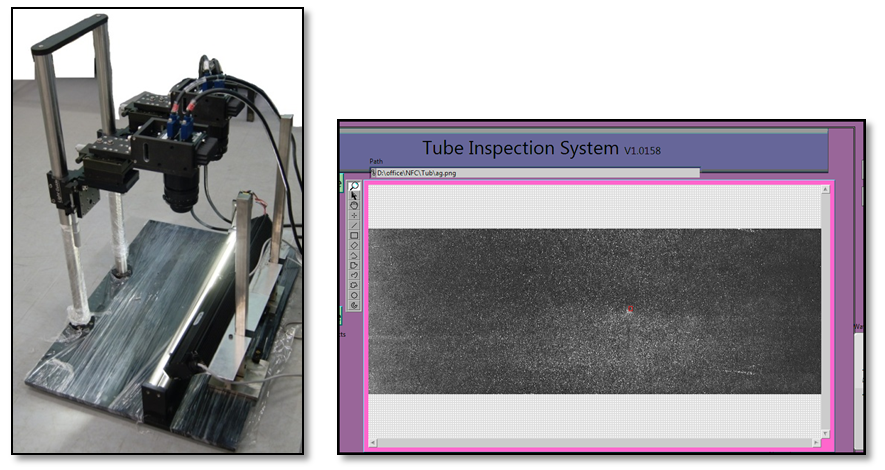
<>PHWR ईंधन ट्यूब निरीक्षण प्रणाली
नाभकीय ईंधन समिश्र (एनएफसी), हैदराबाद के लिए PHWR ईंधन ट्यूब पर सतह दोषों का पता लगाने हेतु मशीन दृष्टि आधारित निरीक्षण प्रणाली विकसित की गई है। एनएफसी ने दोषों को डेंट, पिट, हैंडलिंग मार्क, टूल मार्क, चपटापन, जलने के निशान और हैंडलिंग दोष के रूप में परिभाषित किया है। इस प्रणाली में 8K रिज़ॉल्यूशन वाले 2 लाइन स्कैन कैमरे और रोशनी व्यवस्था हेतु 2 12”-लाइन लाइट लगी हुई हैं। यह प्रणाली ईंधन ट्यूब के पूर्ण 500 मिमी लम्बाई की छवि लेती है और विश्लेषण करती है।
|