| त्वरक नियन्त्रण प्रणाली प्रभाग |
| बीम-लाइन (बीएल) संरेखण के लिए एजेंट आधारित नियंत्रण प्रणाली |
|
एसआरएस में इलेक्ट्रॉन कक्षा में ऑर्बिट बंप आमतौर पर बीएल प्रयोग स्टेशनों पर एसआर के संरेखण के लिए प्रदान किए जाते हैं। अन्य चुंबक प्रकाशिकी के शीर्ष पर कोर्रेक्टर या स्टीयरिंग मैग्नेट का उपयोग किया जाता है। इन सुधारकों का उपयोग SOFB द्वारा भी किया जाता है। अब तक, SOFB प्रणाली का उपयोग करके स्थानीय बंप प्रदान किया जाता था। बाद में बदलते संदर्भ कक्षा के आसान दृश्य के लिए SOFB एप्लिकेशन में ऑपरेटर को भविष्य कहनेवाला सुविधाएं प्रदान की गईं। हालाँकि यह प्रक्रिया पुनरावृत्त हो जाती है और स्वचालित और बुद्धिमान एल्गोरिथम की आवश्यकता महसूस की गई।
एसआरएस में अक्सर विभिन्न उद्देश्यों के लिए स्थानीय इलेक्ट्रॉन कक्षा टक्कर के आवेदन की आवश्यकता होती है। इसे इस तरह से लागू किया जाता है कि रिंग में वांछित स्थानीय इलेक्ट्रॉन कक्षा प्रोफ़ाइल कम से कम कहीं और प्रभावित होती है। बदले में इसके लिए सटीक सिस्टम मॉडल की आवश्यकता होती है। हालांकि, त्वरक में, ऑपरेटिंग बिंदु के साथ पैरामीटर बदलते हैं और इस तरह के गतिशील सिस्टम के लिए सिस्टम का सटीक मॉडल भी संभव नहीं है। सिस्टम की गतिशीलता से मॉडल के मामूली विचलन से भी बीम पर गंभीर दुष्प्रभाव हो सकते हैं। इसलिए, कक्षा सुधार में किए गए प्रयासों को कम करने के लिए और हर बार मैन्युअल ट्यूनिंग गतिविधि की आवश्यकता होने पर स्थानीय टक्कर के बाहर अशांति को कम करने के लिए, आत्म कौशल अद्यतन क्षमता के साथ, टक्कर पैरामीटर खोजने के लिए एक बुद्धिमान एजेंट आधारित समाधान, सिंधु में लागू करने की योजना बनाई गई है- 2 कक्षा नियंत्रण हालांकि। यह प्रणाली आस-पास के अन्य बीएल को परेशान किए बिना किसी विशेष बीएल के लिए इलेक्ट्रान बीम को संरेखित करने में मदद करती है। बीएल के चारों ओर एक स्थानीय बंद टक्कर दी गई है और कक्षा नियंत्रण के लिए नियंत्रण एजेंटों को सीखने और अद्यतन करने के लिए सिस्टम की बदलती परिचालन स्थितियों को ट्रैक करने के लिए एक बाधा अनुमानी सीखने को तैनात किया गया है। एप्लिकेशन की महत्वपूर्णता प्रस्तावित सॉफ्टवेयर के स्थिर, विश्वसनीय और मजबूत संचालन की मांग करती है। आवेदन में जांच अपनाई जाती है और अंतिम तैनाती से पहले सत्यापन और सत्यापन परीक्षण किए जाएंगे।
नीचे दिया गया आंकड़ा क्लाइंट एप्लिकेशन जीयूआई का एक स्नैप है जो चयनित बीएल (यहां इसका बीएल 12), कौशल सेट ग्राफ, स्थानीय सुधारक वर्तमान ग्राफ, टक्कर और रिसाव ग्राफ और ऑपरेशन के विभिन्न तरीकों को सक्रिय करने के लिए इंटरफ़ेस बटन के लिए इसके विभिन्न मानकों को हाइलाइट करता है, जैसे अनुकरण टक्कर बीएल नमूने में स्थिति बदलने के माध्यम से सुधारकों और बीपीआई पर आवश्यकता, सिम्युलेटेड अनुरोध को अंतःक्रियात्मक रूप से लागू करें (सीखने के साथ, यदि आवश्यक हो), अनुरोध को जल्दी से लागू करें और मैन्युअल रूप से अनुरोध लागू करें (चरण दर चरण)।
आंकड़ा दिखाता है, स्थानीय टक्कर को सहनीय टक्कर रिसाव के साथ हासिल किया जाता है यानी लगभग 250 µm की टक्कर ऊंचाई प्राप्त करने के लिए 6.3 µm और सुधारक मान ± 6ए की बाधा सीमा के भीतर हैं। सिस्टम मॉडल के अनुसार, बीएल 12 नमूना बिंदु पर 640 माइक्रोन की स्थिति परिवर्तन की आवश्यकता थी जो कि बिना किसी सीखने के चक्र के अनुप्रयोग द्वारा प्राप्त किया गया था।
|
| |
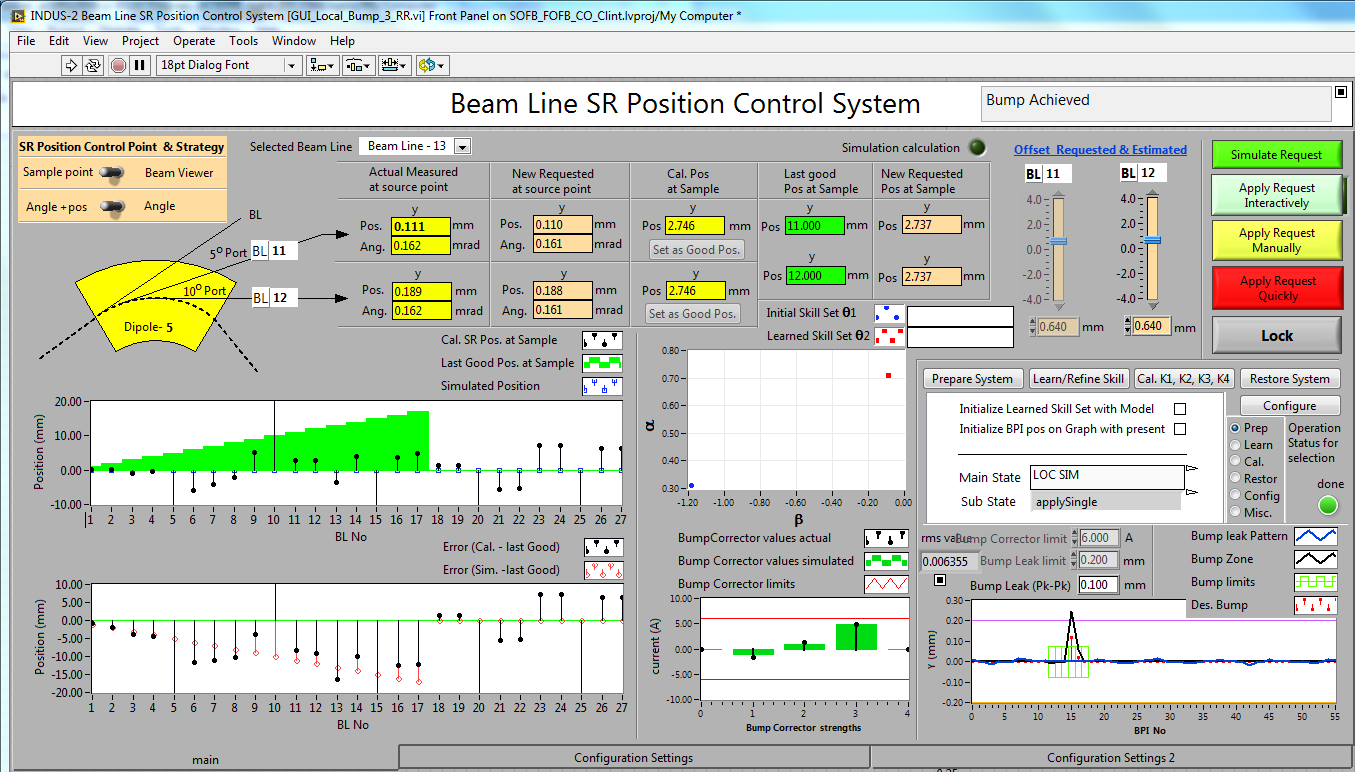 |
| चित्र 1: बीमलाइन एसआर स्थिति नियंत्रण प्रणाली [पूर्ण चित्र] |
| |
|